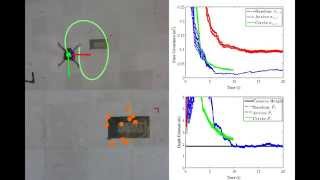
Media Summary: This is the video of the paper: E. Umili, M. Tognon, D. Sanalitro, G. Oriolo, and A. Franchi, “Communication-based and ... Video associated to the paper S. D'Angelo, F. Pagano, R. Caccavale, V. Scognamiglio, A. De Crescenzo, P. Merone, S. Ciaravino, ... In a Disaster Stricken Environment, it's vital to assess the damage quickly, analyse the stability of the environment, and allocate ...
Multi Robot Aerial Robot Collaborative - Detailed Analysis & Overview
This is the video of the paper: E. Umili, M. Tognon, D. Sanalitro, G. Oriolo, and A. Franchi, “Communication-based and ... Video associated to the paper S. D'Angelo, F. Pagano, R. Caccavale, V. Scognamiglio, A. De Crescenzo, P. Merone, S. Ciaravino, ... In a Disaster Stricken Environment, it's vital to assess the damage quickly, analyse the stability of the environment, and allocate ... Sarah Tang, Koushil Sreenath, and Vijay Kumar. Presented at the International Symposium on Paper: Website: Abstract: We introduce the In our recent submission to the 2016 International Conference on
Caltech's Center for Autonomous Systems and Technologies (CAST) and the Technology Innovation Institute in Abu Dhabi, UAE, ...