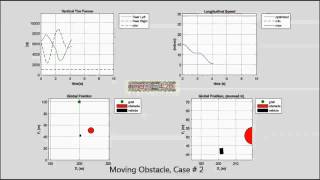
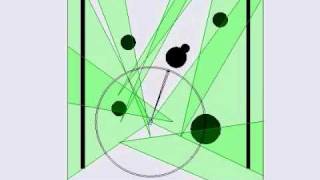
Media Summary: PTEM (Probabilistic Threat Exposure Map) Based Accompanies the paper J. Johnson and K. Hauser. Optimal Acceleration-Bounded Trajectory Planning in Dynamic Environments ... This is a simulation of an autonomous vehicle
Moving Obstacle Avoidance Example - Detailed Analysis & Overview
PTEM (Probabilistic Threat Exposure Map) Based Accompanies the paper J. Johnson and K. Hauser. Optimal Acceleration-Bounded Trajectory Planning in Dynamic Environments ... This is a simulation of an autonomous vehicle This video shows the red robot detects the blue robot and then does Moving obstacles Avoidance with Corridor Constraint