Media Summary: More info : Real drone test: Peacock Exploration: Lightweight ... See the other videos in this series: This video ... A brief survey over other approaches to vehicle
Motion Primitives Based Path Planning - Detailed Analysis & Overview
More info : Real drone test: Peacock Exploration: Lightweight ... See the other videos in this series: This video ... A brief survey over other approaches to vehicle Research & Development. This is a brief explanation of the video/paper " Need to get to your goal quickly? Ensure you plan the right It builds on our previous work that introduced feedback-
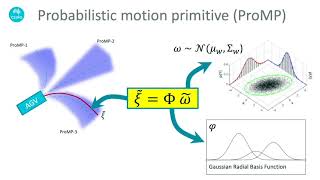
Mark Henderson and Trung Dung Ngo The More-Than-One Robotics Laboratory University of Prince Edward Island, Canada ... In this work we present a new methodology on learning- ... Jason Williams, Paulo V K Borges, "PROMPT: Probabilistic In this video we will demonstrate two families of