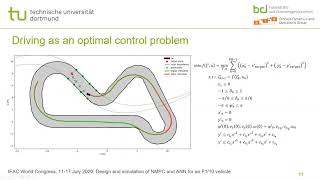
Media Summary: Presented paper can be downloaded here: ... Abstract: This paper addresses the challenges of developing an embedded non-linear Model Predictive Control - Udacity Self-Driving Car Engineer Nanodegree
Model Predictive Control Udacity Self - Detailed Analysis & Overview
Presented paper can be downloaded here: ... Abstract: This paper addresses the challenges of developing an embedded non-linear Model Predictive Control - Udacity Self-Driving Car Engineer Nanodegree Udacity Self-Driving Car Nanodegree - Model Predictive Control Project