Media Summary: Presented paper can be downloaded here: ... Udacity Self-Driving Car Nanodegree Term2 This project discusses a real-time implementation of a hierarchical
Model Predictive Control High Speed - Detailed Analysis & Overview
Presented paper can be downloaded here: ... Udacity Self-Driving Car Nanodegree Term2 This project discusses a real-time implementation of a hierarchical Want to learn industrial automation? Go here: ▷ Want to train your team in industrial automation? Go here: ... This video is part of an ICRA 2016 submission. The Georgia Tech AutoRally platform drives fully autonomously using only ... This video accompanies the paper "Strategizing at
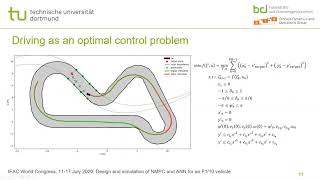
Abstract: This paper addresses the challenges of developing an embedded non-linear