Media Summary: Learn how to design and tune a PID controller to perform navigation tasks like dead reckoning. Enter the MATLAB and Simulink ... Lagrangian method, Newton equation and the Euler axiom. Sebastian Castro shows you how to get started
Mobile Robotics Part 2 Using - Detailed Analysis & Overview
Learn how to design and tune a PID controller to perform navigation tasks like dead reckoning. Enter the MATLAB and Simulink ... Lagrangian method, Newton equation and the Euler axiom. Sebastian Castro shows you how to get started George Holmes, PhD student in Mechanical Engineering, presents a simulation of a differential drive This is a video supplement to the book "Modern See what's new in the latest release of MATLAB and Simulink: Download a trial:
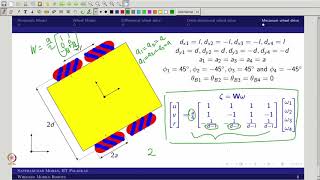
Differential wheel drive kinematic simulation, kinematic simulation of mecanum wheel. Scientists at the University of Liverpool have developed a fully autonomous