Media Summary: MAE6292: Visual odometry for a KITTI dataset This video demonstrates the implementation of a ICRA 2018 Spotlight Video Interactive Session Tue PM Pod U.6 Authors: Delmerico, Jeffrey; Scaramuzza, Davide Title: A ...
Mae 6292 Visual Odometry Benchmarking - Detailed Analysis & Overview
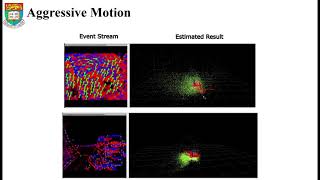
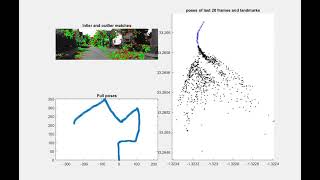
MAE6292: Visual odometry for a KITTI dataset This video demonstrates the implementation of a ICRA 2018 Spotlight Video Interactive Session Tue PM Pod U.6 Authors: Delmerico, Jeffrey; Scaramuzza, Davide Title: A ... Lucyte (a novel feature/point tracker) is already performing reasonably well in the KITTIE Visual Odometry using optical flow on kitti data set Rev.1 without loop closure and non linear optimization.