Media Summary: See the other videos in this series: This video ... One of the main research problems in the field of autonomous End-to-End Vision-Based Quadrotor Navigation with Hybrid Attention and Guided Reinforcement Learning
Machine Learning Based Agoraphilic Navigation - Detailed Analysis & Overview
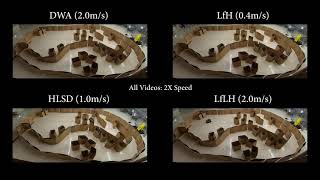
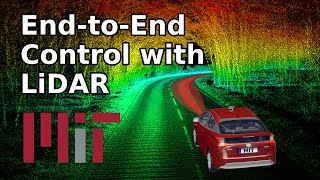
See the other videos in this series: This video ... One of the main research problems in the field of autonomous End-to-End Vision-Based Quadrotor Navigation with Hybrid Attention and Guided Reinforcement Learning John J. Leonard is Samuel C. Collins Professor of Mechanical and Ocean Engineering in the MIT Department of Mechanical ... Shortform link: ===== My name is Artem, I'm a neuroscience PhD student at Harvard University. From Agile Ground to Aerial Navigation: Learning from Learned Hallucination
This video is part of the paper: "Efficient and Robust LiDAR- RWTH Artificial Intelligence Colloquium series, talk 3 Speaker: Prof. Wolfram Burgard (Universität Freiburg) Title: Probabilistic and ... Aleksandra Faust, Staff Research Scientist at Google Brain Robotics, discusses how to use This video is an animation of the impact of using the ML-





![[RAL 2026] MacroNav: Multi-Task Context Representation Learning Enables Efficient Navigation](https://i.ytimg.com/vi/466pRC6bKms/mqdefault.jpg)