Media Summary: This video is part of a series of videos for my Final Year Project Dissertation. The algorithm shown here is the A* Local Planner does not follow the global planner accurately This video is part of a series of videos for my Final Year Project Dissertation. The algorithm shown here is the Carrot
Local Global Planner Test - Detailed Analysis & Overview
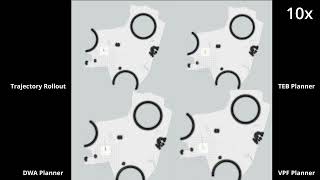
This video is part of a series of videos for my Final Year Project Dissertation. The algorithm shown here is the A* Local Planner does not follow the global planner accurately This video is part of a series of videos for my Final Year Project Dissertation. The algorithm shown here is the Carrot Compiled ROS melody on a Raspberry PI3 (took one day) and quickly tried out 'teb_local_planner' on it... Global Planner: Smac (Dubin) + Teb as local Planner ROS2 Nav2 The aim of this video is to show the performace of the diferent