Media Summary: The sixth video in the INTRODUCTORY programming In the final video of the swerve drive series, we'll program autonomous movement An episode of the Sunday night FRC Roundtable for FIRST Robotics students and mentors. Team 2052 KnightKrawler student ...
Lesson 5 Using Pathplanner And - Detailed Analysis & Overview
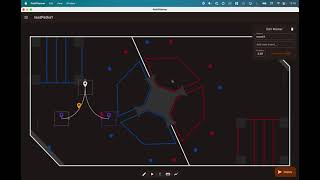
The sixth video in the INTRODUCTORY programming In the final video of the swerve drive series, we'll program autonomous movement An episode of the Sunday night FRC Roundtable for FIRST Robotics students and mentors. Team 2052 KnightKrawler student ... demonstration of how to leverage the new event markers, stop points, and path groups in Let's program a command-based elevator robot in a simulator! The code for this video: ... In this video, I introduce our new VEX V5
Mistake at 13:25. Make sure when mirroring autos you place chassis.mirror_all_auton_x_pos() underneath if (get_name) {return ... ... also knowledge of how the robot can move 3506 YETI Robotics is back on The Open Alliance Show to detail their CAD