Media Summary: Topics covered: - Feature detection, descriptors and matching - Topics covered: - RANSAC algorithm - Iterative closest point algorithm - The SLAM problem - Graph SLAM - Non-linear map ... For more information about Stanford's online Artificial Intelligence programs visit: This
Lecture 6 Visual Navigation For - Detailed Analysis & Overview
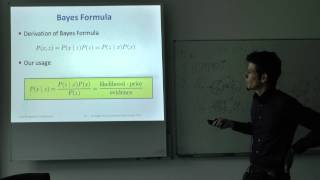
Topics covered: - Feature detection, descriptors and matching - Topics covered: - RANSAC algorithm - Iterative closest point algorithm - The SLAM problem - Graph SLAM - Non-linear map ... For more information about Stanford's online Artificial Intelligence programs visit: This Topics covered: - Image filters - 2D image alignment - Corner detectors - Kanade-Lucas-Tomasi tracker - Interesting research ... Topics covered: - Brushless Motors - Motor Controllers - Cascaded Control - PID Control - Advanced Control Techniques Course ... Probabilistic Models and State Estimation Topics covered: - Bayesian Probability Theory - Bayes Filter - Normal Distribution ...
This is the 3min spotlight talk on our paper titled "Combining Optimal Control and Learning for Status: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2021 accepted. * Category: Aerial Systems: ... MIT 16.687 Private Pilot Ground School, IAP 2019 Instructor: Philip Greenspun, Tina Srivastava View the complete course: ... Jonathan Kelly (University of Toronto) - The difference is night and day: learning models of appearance change for robust