Media Summary: Reinforcement Learning Course by David Silver# This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ... This video is part of the Udacity course "Introduction to Computer Vision". Watch the full course at ...
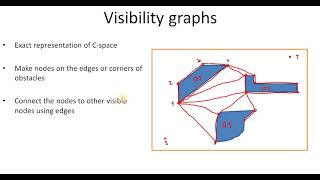
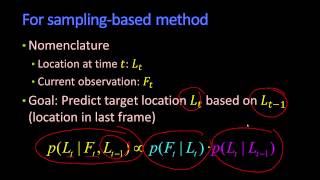
Lecture 6 Sampling Based Algorithms - Detailed Analysis & Overview
Reinforcement Learning Course by David Silver# This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ... This video is part of the Udacity course "Introduction to Computer Vision". Watch the full course at ...