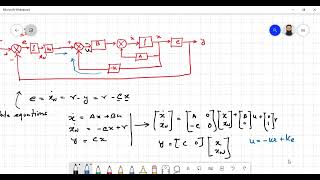
Media Summary: Discusses the elements of a closed loop diagram block diagram. Course details ...
Lecture 12a Controller Design Example - Detailed Analysis & Overview
Discusses the elements of a closed loop diagram block diagram. Course details ...
Media Summary: Discusses the elements of a closed loop diagram block diagram. Course details ...
Discusses the elements of a closed loop diagram block diagram. Course details ...
This video is in continuation of the

Wherein a PID

Engineering

Bonus Pi

Discusses (feedback)

Wherein a PID
Steady State Error

Discusses the elements of a closed loop diagram block diagram. Course details ...

Proportional-lag

Wherein a proportional-lag

Wherein a
ROBT 303 - Linear

ROBT 303 - Linear