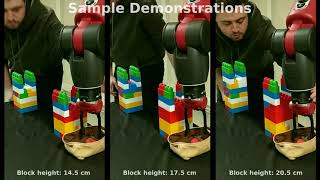
Media Summary: Takamitsu Matsubara, Sang-Ho Hyon, Jun Morimoto: This video introduces CDMPs, a novel method to include operational constraints while Learning by demonstration with dynamic movement primitives
Learning Parametric Dynamic Movement Primitives - Detailed Analysis & Overview
Takamitsu Matsubara, Sang-Ho Hyon, Jun Morimoto: This video introduces CDMPs, a novel method to include operational constraints while Learning by demonstration with dynamic movement primitives Pick and place action avoiding obstacles. Status: IEEE Robotics and Automation Letters (RA-L) 2020 published * Authors: Hyoin Kim, Hoseong Seo, Seungwon Choi, Claire ... A Programming by Demonstration software framework is developed utilizing
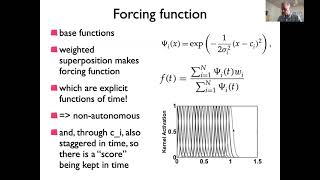
In this short lecture, I review the core idea behind the notion of