Media Summary: Robotic manipulation tasks, such as wiping with a soft sponge, require control from multiple rich ... Authors: Norman Di Palo and Edward Johns Institution: The Robot Full video: Research paper: Abstract: In principle, reinforcement ...
Learning From Demonstration With Weakly - Detailed Analysis & Overview
Robotic manipulation tasks, such as wiping with a soft sponge, require control from multiple rich ... Authors: Norman Di Palo and Edward Johns Institution: The Robot Full video: Research paper: Abstract: In principle, reinforcement ... In recent years, demand for robot-assisted rehabilitation has increased due to the rising number of elderly and disabled people. IROS 2021 video attachment for paper “Combining Method developed by H. Posenauer and W. Ertel, University of Ravensburg-Weingarten.
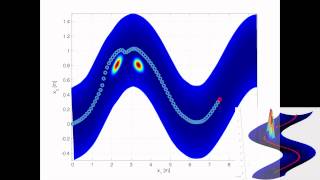
A human demonstrates pick&place tasks, the robot applies Exploration in environments with sparse rewards has been a persistent problem in reinforcement In this research, we propose a user-guided motion planning algorithm in combination with reinforcement