Media Summary: Robotic grasping in densely cluttered environments is challenging due to scarce collision-free grasp affordances. Non-prehensile ... We propose an Innovative deep reinforcement Authors: Yilong Wang and Edward Johns Institution: The Robot
Learning Dual Arm Push And - Detailed Analysis & Overview
Robotic grasping in densely cluttered environments is challenging due to scarce collision-free grasp affordances. Non-prehensile ... We propose an Innovative deep reinforcement Authors: Yilong Wang and Edward Johns Institution: The Robot M. Kobayashi, J. Yamada, M. Hamaya, K. Tanaka, ``LfDT: Presentation on 31st of May in the ICRA2021 workshop on "Bimanual Manipulation: This video marks our lab's first step into imitation
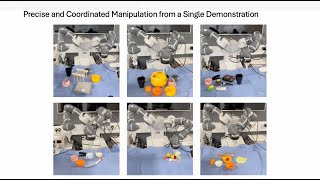
Teaching by demonstration (TbD) techniques have been extensively investigated in the recent decades to enable transferring ... In this video, we take a look at Jackson, who went viral for his unique physique after only Our robot has learned how to manipulate objects using Adaptive Dual Arm Manipulation with Reinforcement Learning and Variable Impedance Control copy A. Harnkhamen, T. Rassameecharoenchai, K. Rothomphiwat and P. Manoonpong, "An Integrated Vision-Based Robotic