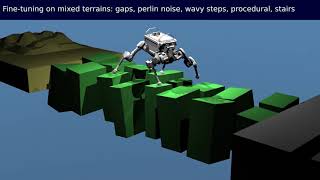
Media Summary: Paper: Whole-body optimizers have been successful at automatically computing complex ... We trained terrain-aware locomotion controllers for the ANYmal quadruped robot by imitating planned trajectories. A Video accompanying the paper "Efficient Humanoid Contact
Learning A Centroidal Motion Planner - Detailed Analysis & Overview
Paper: Whole-body optimizers have been successful at automatically computing complex ... We trained terrain-aware locomotion controllers for the ANYmal quadruped robot by imitating planned trajectories. A Video accompanying the paper "Efficient Humanoid Contact We present a flexible and efficient approach for generating multilegged locomotion. Our model-predictive control (MPC) system ... C-CROC: Continuous and Convex Resolution of This project demonstrates how to track a moving ball in video frames using Python & OpenCV. By calculating image moments and ...
Edward Johns (2025 TAMP Workshop): Task and Motion Planning as Inference Paper: Code: Chamzas, Constantinos, Aedan Cullen, ... Guest lecture for CSCI5551 (Introduction to Intelligent Robotic Systems) Spring 2024 at The University of Minnesota - Twin Cities ... Paper: Liam Schramm and Abdeslam Boularias. " ICRA 2018 Spotlight Video Interactive Session Thu AM Pod H.7 Authors: Ponton, Brahayam; Herzog, Alexander; Del Prete, ... Tom Silver*, Rohan Chitnis*, Joshua Tenenbaum, Leslie Pack Kaelbling, Tomas Lozano-Perez IROS 2021 Paper: ...