Media Summary: Grégory Rogez; Philippe Weinzaepfel; Cordelia Schmid We propose an end-to-end architecture for joint 2D and 3D human pose ... Grégory Rogez, Philippe Weinzaepfel, Cordelia Schmid, Until now in the previous chapter we have discussed Image
Lcr Net Localization Classification Regression - Detailed Analysis & Overview
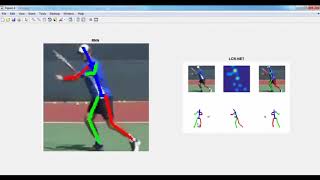
Grégory Rogez; Philippe Weinzaepfel; Cordelia Schmid We propose an end-to-end architecture for joint 2D and 3D human pose ... Grégory Rogez, Philippe Weinzaepfel, Cordelia Schmid, Until now in the previous chapter we have discussed Image Contact Best Matlab Simulation Projects Visit us: Conférence : Machine learning for artificial intelligence Lien de la conférence ... We showcase some qualitative results of our new 6D camera
In this AI Research Roundup episode, Alex discusses the paper: 'R3: 3D Reconstruction via Relative Alex Kendall; Roberto Cipolla Deep learning has shown to be effective for robust and real-time monocular image relocalisation.



![[Conférence] C. SCHMID - Automatic understanding of the visual world](https://i.ytimg.com/vi/LqcyG6g5WsQ/mqdefault.jpg)






