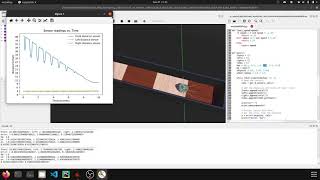
Media Summary: TASK 1 LAB 2 ROBOTIC (IZZAT,ARIFF,QUSYAIRI) The purpose of this video is to show the fundamentals of how a PID closed feedback loop of a webots epuck Robotics application Lab 2 task 1 Wall distance
Lab 2 Robotik Task 1 - Detailed Analysis & Overview
TASK 1 LAB 2 ROBOTIC (IZZAT,ARIFF,QUSYAIRI) The purpose of this video is to show the fundamentals of how a PID closed feedback loop of a webots epuck Robotics application Lab 2 task 1 Wall distance





![[Robotics - 1/3] Dual Manipulator Assembly Task - Lab Assignment 1 - Autumn 2019 - UTS](https://i.ytimg.com/vi/lrr2d_io8Yc/mqdefault.jpg)





