Media Summary: This work's goal is to explore how to use the GPGPU programming paradigm in order to improve the AI in the context of ... Abstract: Path planning of 3D solid objects leads to search in a six-dimensional configuration space, which can be solved by ... See the other videos in this series: This video ...
Iterative Parallel Sampling Rrt For - Detailed Analysis & Overview
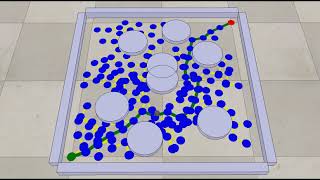
This work's goal is to explore how to use the GPGPU programming paradigm in order to improve the AI in the context of ... Abstract: Path planning of 3D solid objects leads to search in a six-dimensional configuration space, which can be solved by ... See the other videos in this series: This video ... This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ... The algorithm was suggested in the following paper: [1] Islam, F., Nasir, J., Malik, U., Ayaz, Y., & Hasan, O. (2012, August). The paper that first described this algorithm is cited below: [1] Gammell, J. D., Srinivasa, S. S., & Barfoot, T. D. (2014, September).
RRT*: A sampling-based motion planning algorithm Mark Henderson and Trung Dung Ngo The More-Than-One Robotics Laboratory University of Prince Edward Island, Canada ...










![Motion Planning Algorithms (RRT, RRT*, PRM) - [MIT 6.881 Final Project]](https://i.ytimg.com/vi/gP6MRe_IHFo/mqdefault.jpg)