Media Summary: A plethora of localization solutions for different sensor modalities exists, yet robust sensing in degraded perception conditions ... This video provides some intuition around In this Chapter: - Introduction and Iterative Closest Point algorithm - Known Correspondences - Unknown Correspondences -
Icp Based Pose Graph Slam - Detailed Analysis & Overview
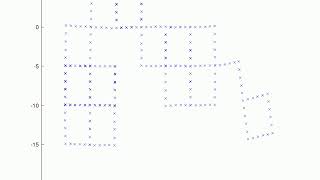
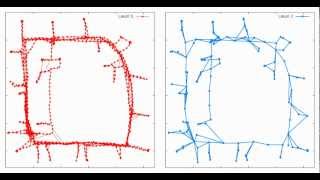
A plethora of localization solutions for different sensor modalities exists, yet robust sensing in degraded perception conditions ... This video provides some intuition around In this Chapter: - Introduction and Iterative Closest Point algorithm - Known Correspondences - Unknown Correspondences - Mobile robot mapping system. Sensors input: lidar, IMU, encoder (camera only for visualization) Mobile platform: ITRI MP1 Lidar ... ICRA 2018 Spotlight Video Interactive Session Wed AM Pod U.4 Authors: Schlegel, Dominik; Colosi, Mirco; Grisetti, Giorgio Title: ... The idea of assignment 10 of Robot Mapping taught by Dr. Cyrill Stachniss is to iterate through Newton-Gauss optimization ...
Giorgio Grisetti, Rainer Kümmerle, Cyrill Stachniss, Udo Frese, and Christoph Hertzberg Hierarchical Optimization on Manifolds ...






![[SymForce tutorial] Pose-graph SLAM Toy example](https://i.ytimg.com/vi/TUyTH6TW4Ks/mqdefault.jpg)