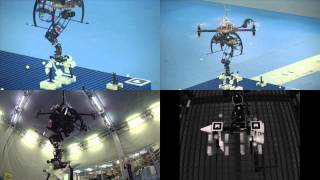
Media Summary: eXactoPOSE is a robot control technology that allows the robot to fuse sensor data from multiple sources of position and force ... Using 2D visual features in a position-based Bracket grasping demonstration: - using the CAD models of the bracket and of the feeder - the camera pose is estimated thanks to ...
Hybrid Visual Servoing - Detailed Analysis & Overview
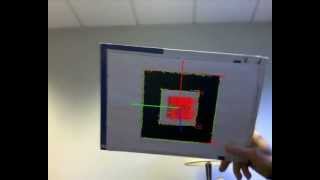
eXactoPOSE is a robot control technology that allows the robot to fuse sensor data from multiple sources of position and force ... Using 2D visual features in a position-based Bracket grasping demonstration: - using the CAD models of the bracket and of the feeder - the camera pose is estimated thanks to ... Final project for Medical Robotics course 2019 - Sapienza University Rome. The projected was devoloped starting from a ... Master thesis on "Vision-force based grasping using 5 fingers Schunk hand" This video is the internal view of the camera used to
Hanz Cuevas-Velasquez, Nanbo Li, Radim Tylecek, Marcelo Saval-Calvo, Robert Fisher ViSP is a cross-platform software that allows prototyping and fast application development in visual tracking and