Media Summary: Lu, J., Liang, Z., Xie, T., Ritcher, F., Lin, S., Liu, S., & Yip, M. C. (2024). CtRNet-X: Camera-to- Macroact's R&D lab focuses to enhance the interaction between Introductory video of the paper "Real-time Holistic
Humanoid Robot Pose Estimation - Detailed Analysis & Overview
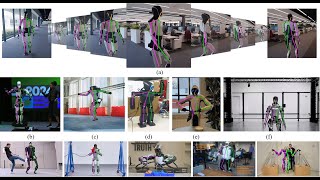
Lu, J., Liang, Z., Xie, T., Ritcher, F., Lin, S., Liu, S., & Yip, M. C. (2024). CtRNet-X: Camera-to- Macroact's R&D lab focuses to enhance the interaction between Introductory video of the paper "Real-time Holistic Project Website: Contact: sai_srinivas.jeevanandam.de ... For the first time, an algorithm trained only on synthetic data is able to beat a state-of-the-art network trained on real images for ... A demo of the robot build and developed for the modules
Vision-based state and pose estimation for robotic bin picking of cables Z. Erickson, M. Collier, A. Kapusta, and C. C. Kemp, "Tracking




![[ECCV 2024] Real-time Holistic Robot Pose Estimation with Unknown States](https://i.ytimg.com/vi/9NsLJvp1IPE/mqdefault.jpg)
![[IROS 25] JENGA: Object selection and pose estimation for robotic grasping from a stack](https://i.ytimg.com/vi/J4IIiy0PLfQ/mqdefault.jpg)




