Media Summary: This is a copy of the presentation given by our co-founder, Prof. Ilian Bonev, at Automate 2023. This talk aims at explaining the ... Need to get to your goal quickly? Ensure you plan the right Paper, video, open-source code, slides and more: Intro: 00:29 - Why Legged
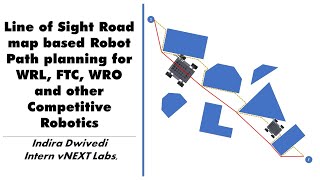
How To Optimize Robot Path - Detailed Analysis & Overview
This is a copy of the presentation given by our co-founder, Prof. Ilian Bonev, at Automate 2023. This talk aims at explaining the ... Need to get to your goal quickly? Ensure you plan the right Paper, video, open-source code, slides and more: Intro: 00:29 - Why Legged This video is part of an online course, Intro to Artificial Intelligence. Check out the course here: ... In this Easy Automator tutorial, Tamas demonstrates how to use the Remove Redundant Waypoints feature for more efficient In this video, Our summer Intern, Indira Dwivedi presents the idea of simple line of sight based Roadmap method based ...
Planning time optimal motion with limited joint speed, acceleration, torque, or even torque rate for Sebastian Castro discusses technical concepts, practical tips, and software examples for motion