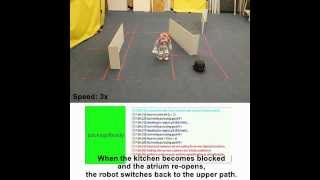
Media Summary: RSS2014 - Correct High-level Robot Behavior in Environments with Unexpected Events Hadas Kress- Gazit, Professor Sibley School of Mechanical and Aerospace Engineering, College of Engineering - Princeton April ... This work presents a demo for automatically synthesizing and re-synthesizing a hybrid controller that
Guaranteed High Level Robot Behavior - Detailed Analysis & Overview
RSS2014 - Correct High-level Robot Behavior in Environments with Unexpected Events Hadas Kress- Gazit, Professor Sibley School of Mechanical and Aerospace Engineering, College of Engineering - Princeton April ... This work presents a demo for automatically synthesizing and re-synthesizing a hybrid controller that Quick Tutorial on Complex, Simple, and Basic Physical AI is moving fast. But Andrew Barry says the next major breakthrough in Hadas Kress-Gazit Assistant Professor, Cornell University February 28, 2014 Abstract Why don't we have
Computer Science Distinguished Lecture Series presents, "Synthesis for This video presents two experimental demonstrations of our approach to Reinforcement learning - where the machines are taught to mimic humans - is how AI is trained. It aims to make the