Media Summary: This video explains the hands-on planning project that we did as part of our 2nd semester in Universitat de Girona during the ... In this article a coordinated approach to 3D A project that we presented during our masters. It's a
Frontier Based Exploration Using Hybrid - Detailed Analysis & Overview
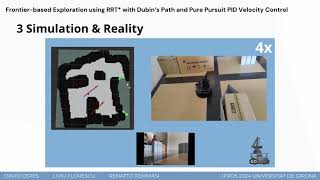
This video explains the hands-on planning project that we did as part of our 2nd semester in Universitat de Girona during the ... In this article a coordinated approach to 3D A project that we presented during our masters. It's a Support on ROS Kinetic is a bit sketchy, problems Many scenarios in which robots are used nowadays require some degree of autonomous In this paper, we propose an extension to classical
Hybrid mapping with autonomous exploration - Mobile robot