Media Summary: F. Kerestecioğlu and A. Cezayirli (2013). A non-communicating multi- The fitness functions only rewards the swarm for cohesion and alignment. Thus, when conducting our initial set of experiments, ... Turgut A.E., Celikkanat H., Gokce, F. and Sahin, E. (2008) . Self-Organized
Flocking Formation 11 Robots - Detailed Analysis & Overview
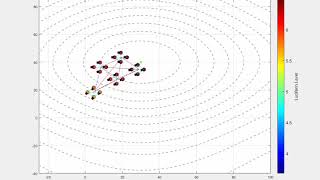
F. Kerestecioğlu and A. Cezayirli (2013). A non-communicating multi- The fitness functions only rewards the swarm for cohesion and alignment. Thus, when conducting our initial set of experiments, ... Turgut A.E., Celikkanat H., Gokce, F. and Sahin, E. (2008) . Self-Organized Cooperative Flocking and Formation Control Simulation Vee Flocking Formation, Rotation, and Movement in the Plane Flocking + Formation Control + Path Following
Guiding Self-organized Flocking in mobile robots