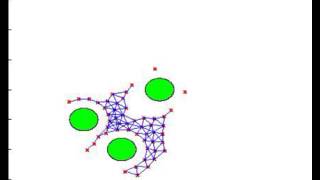
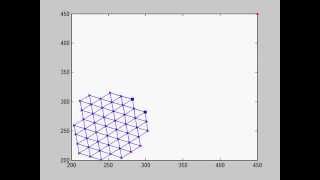
Media Summary: This video shows an experimental validation of rigidity-based kinematic translational maneuvering Five robots fall into formation while avoiding collisions with themselves as they follow the blue-red path moving as a Multi-Agent Dynamic System (Flocking with Obstacles)
Flocking Control For Multiple Targets - Detailed Analysis & Overview
This video shows an experimental validation of rigidity-based kinematic translational maneuvering Five robots fall into formation while avoiding collisions with themselves as they follow the blue-red path moving as a Multi-Agent Dynamic System (Flocking with Obstacles) All robots are first programed to go to the rendezvous point based on normal Barrera, Armando Serrato, Aurelio López-López, and Gustavo Rodríguez Gómez. "Multitarget Cooperative Flocking and Formation Control I
this movie show the experiment of adaptive This paper presents a novel approach that allows a swarm of heterogeneous robots to produce simultaneously segregative and ...










![[ICRA2021] Flocking-Segregative Swarming Behaviors using Gibbs Random Fields](https://i.ytimg.com/vi/KooNGIStWlM/mqdefault.jpg)