Media Summary: All robots are first programed to go to the rendezvous point based on normal Hardware in each robot: ATMega 16, GP2d12 Infrared Sensor, CMPS03 Magnetic Compass Sensor, Xbee wireless ... On Segregative Behaviors Using Flocking and Velocity Obstacles
Flocking And Edge Avoidance - Detailed Analysis & Overview
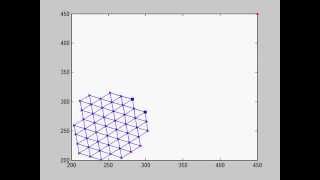
All robots are first programed to go to the rendezvous point based on normal Hardware in each robot: ATMega 16, GP2d12 Infrared Sensor, CMPS03 Magnetic Compass Sensor, Xbee wireless ... On Segregative Behaviors Using Flocking and Velocity Obstacles this movie show the experiment of adaptive