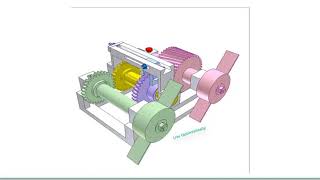
Media Summary: Thank for watching ! 1. Shaft synchronizer (A): The pink input shaft and the green shaft coaxially rotate in opposite directions. A smaller version was commercially available: DexTAR (Dextrous Twin-Arm
Five Bar Parallel Robot 2 - Detailed Analysis & Overview
Thank for watching ! 1. Shaft synchronizer (A): The pink input shaft and the green shaft coaxially rotate in opposite directions. A smaller version was commercially available: DexTAR (Dextrous Twin-Arm