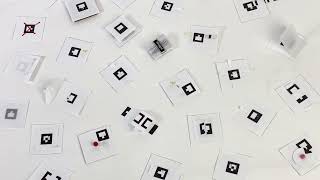
Media Summary: A robot localization/navigation system the uses ceiling mounted This work has been accepted by the 2021 IEEE International Conference on Multisensor Fusion and Integration. Only one Apriltag is available in the environment and a coupled camera-cluster measurement model is employed.
Fiducial Auto Mapping - Detailed Analysis & Overview
A robot localization/navigation system the uses ceiling mounted This work has been accepted by the 2021 IEEE International Conference on Multisensor Fusion and Integration. Only one Apriltag is available in the environment and a coupled camera-cluster measurement model is employed. Navigation using only one marker, which contains four artificial features, is a challenging task since camera pose estimation using ... This is our paper at the KES special session on Eye Movement Data Processing and Analysis (EMDPa) concerning OpenCV and ... device: Gopro hero 6. setting: 2.7K 24fps.
In this work we present the design of thermal The video demonstrates the process of creating a new program using our tool. An operator moves the robot arm to a desired ...