Media Summary: This video shows how DIFODO (the presented This video is outdated. Please watch the new version here: Work currently under submission. Jens Behley and Cyrill Stachniss: "Real-Time Surfel-Based
Fast Visual Odometry For Range - Detailed Analysis & Overview
This video shows how DIFODO (the presented This video is outdated. Please watch the new version here: Work currently under submission. Jens Behley and Cyrill Stachniss: "Real-Time Surfel-Based Authors: Jakob Engel, Juergen Sturm, Daniel Cremers Computer Authors: Shunkai Li, Xin Wang, Yingdian Cao, Fei Xue, Zike Yan, Hongbin Zha Description: Self-supervised VO methods have ... Ever wondered how robots navigate their surroundings and map out their environment using just cameras? This video breaks ...
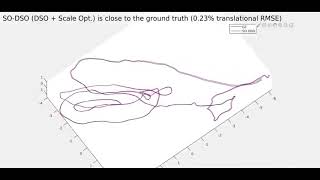
In this video we provide an overview of our recent paper: Driven to Distraction: Self-Supervised Distractor Learning for Robust ... Open-Source Code Available! see Publication: Semi-Dense Multiple DSO+ Scale Optimization Demos [Mo et al., IROS 2019]. ccny_rgbd is collection of tools for real-time Unoriented LATCH descriptor and matcher running on GTX 970M with CUDA. Symmetric matches are enforced, and ~3 billion ...