Media Summary: In this session, we describe the challenges of lifting object-based representations from sensor data from egocentric devices. Feedback Enabled Cascaded Classification Models. More details at: Demo video of Spatial Sampling Network on Cityscapes dataset demo video sequence. The video shows the semantic ...
Fast Scene Understanding - Detailed Analysis & Overview
In this session, we describe the challenges of lifting object-based representations from sensor data from egocentric devices. Feedback Enabled Cascaded Classification Models. More details at: Demo video of Spatial Sampling Network on Cityscapes dataset demo video sequence. The video shows the semantic ... A video summary of the Australian Centre for Robotic Vision (ACRV) We present a framework for efficient inference in structured image models that explicitly reason about objects. We achieve this by ... ... shanghai georgia university here i'm glad to share my paper as39 a
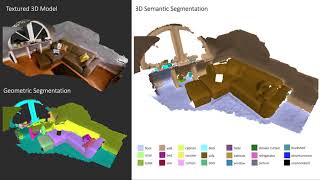
In computer vision applications such as mobile robotics and autonomous driving, 3D Here is a result of Semantic Point Cloud representation, made on Flyvast www.flyvast.com.