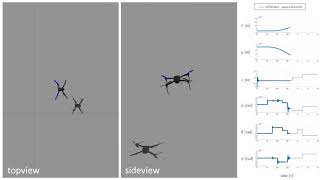
Media Summary: Abstract: Due to the nonlinearities and operational constraints typical to quadcopter missions, Model Predictive Control ( Accurate trajectory tracking control for quadrotors is essential for safe navigation in cluttered environments. However, this is ... Simulation results of the work presented at MED2021 entitled "Conventional and
Explicit Flatness Based Mpc Design - Detailed Analysis & Overview
Abstract: Due to the nonlinearities and operational constraints typical to quadcopter missions, Model Predictive Control ( Accurate trajectory tracking control for quadrotors is essential for safe navigation in cluttered environments. However, this is ... Simulation results of the work presented at MED2021 entitled "Conventional and This lecture provides an overview of model predictive control ( Comparison of PD formation controller and the About: We demonstrate the use of differentiable predictive control (DPC) methodology for learning constrained neural control laws ...
Lecture at the First ELO-X Seasonal School and Workshop (March 22, 2022). Contents of this video: - Model predictive control ... This video presents the problem of moving the free end of a rope between two defined rest positions following an intended path.