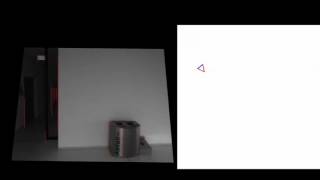
Media Summary: Project page (Code): PDF: Workshop page: ... A presentation for our RA-L 2023 paper, " In this video, one can see example input images (just keyframes) with the detected lines (left) and the estimated trajectory (right, ...
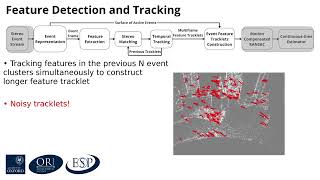
Event Based Stereo Visual Odometry - Detailed Analysis & Overview
Project page (Code): PDF: Workshop page: ... A presentation for our RA-L 2023 paper, " In this video, one can see example input images (just keyframes) with the detected lines (left) and the estimated trajectory (right, ...