Media Summary: This video shows the result of our work on The challenges of guiding satellites in deep-space with limited knowledge about the environment and limited processing power. In this video, Dr. John Christian, an aerospace engineer and assistant professor at West Virginia University, dives into the ...
Efficient Vision Based Navigation Learning - Detailed Analysis & Overview
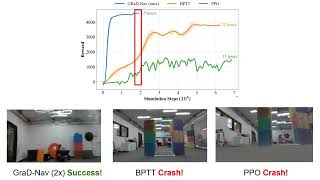
This video shows the result of our work on The challenges of guiding satellites in deep-space with limited knowledge about the environment and limited processing power. In this video, Dr. John Christian, an aerospace engineer and assistant professor at West Virginia University, dives into the ... An algorithm developed at Caltech lets machines teach themselves how to recognize landscapes, even amid the changing ... Due to high computation demands of a full GRaD-Nav: Efficiently Learning Visual Drone Navigation with Gaussian Radiance and Diff. Dynamics
Marius Neuhalfen (Blackswan Space) presents "Developing Autonomous drone race: - Parrot Bebop hardware - Paparazzi-UAV open-source software - Snake-Gate detection, filtering, and ... End-to-End Vision-Based Quadrotor Navigation with Hybrid Attention and Guided Reinforcement Learning In this project, we present a control system that allows a drone to fly autonomously through a series of gates marked with ArUco ... We introduce Keypoint Timeline (KT-) Imitation, a