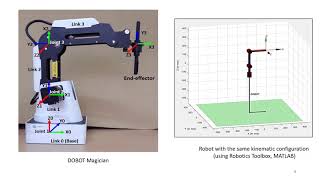
Media Summary: This contributes to the error between the\Nactual path and the generated path 16.412/6.834J Cognitive Robotics - Spring 2019 Professor: Brian Williams MIT. The University of Texas at Austin demonstrates how autonomous inspection drones can self-localize,
Efficient Path Planning And Collision - Detailed Analysis & Overview
This contributes to the error between the\Nactual path and the generated path 16.412/6.834J Cognitive Robotics - Spring 2019 Professor: Brian Williams MIT. The University of Texas at Austin demonstrates how autonomous inspection drones can self-localize, Original paper: Title: End-to-end deep learning-based framework for Ever wondered how robots navigate complex environments without bumping into obstacles? This video breaks down the ... Patrick Varley with Mitsubishi Electric explained that the automated
ust tell the robot what to do — it figures out the rest. With Automatic, The latest video is available at the following link: A supplementary video of our ...