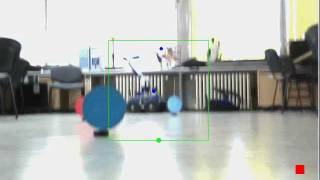
Media Summary: In this video the problem of online trajectory optimization and cooperative collision avoidance is addressed when several ... This video presentation describes the work in the paper titled: Collision-Free This paper presents a novel model-free spatial iterative learning (IL) framework to enhance the
Efficient Mobile Robot Navigation With - Detailed Analysis & Overview
In this video the problem of online trajectory optimization and cooperative collision avoidance is addressed when several ... This video presentation describes the work in the paper titled: Collision-Free This paper presents a novel model-free spatial iterative learning (IL) framework to enhance the This video presents the real-world validation of an end-to-end social Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ... We introduce a detailed realization of industrial
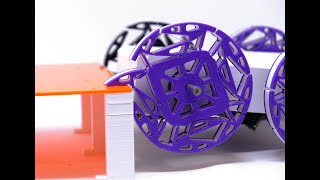
T. Godden*, B. W. Mulvey*, E. Redgrave and T. Nanayakkara, “PaTS-Wheel: A Passively-Transformable Single-Part Wheel for ...