Media Summary: ICRA 2018 Spotlight Video Interactive Session Wed PM Pod U.4 Authors: Chen, Yongbo; Huang, Shoudong; Fitch, Robert; Yu, ... PhD Defense - Aditya Mahajan - March 17, 2021. This work is accept by IROS2020. Paper reference will be given later.
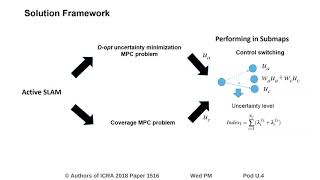
Efficient Active Slam Based On - Detailed Analysis & Overview
ICRA 2018 Spotlight Video Interactive Session Wed PM Pod U.4 Authors: Chen, Yongbo; Huang, Shoudong; Fitch, Robert; Yu, ... PhD Defense - Aditya Mahajan - March 17, 2021. This work is accept by IROS2020. Paper reference will be given later. LiDAR End-to-end Active SLAM in Large-scaled Environments by DRL Mobile robot Husky autonomously explores and builds a map of unknown environment using Mobile robots are high-performance robots that are used to perform a specific function in environments such as land, air and water ...
Active SLAM and autonomous exploration with particle filters