Media Summary: Team Book Worm Team Members: Ali Albazroun Team Name: \"Am I two?\"\n\"No, UR3.\" Members: Abel John - abelj2 Anshul Sanam - anshul2 Ewan Bohannon - eyb2 Remzo ... Forward Kinematics of Closed Chain Robots.
Ece 470 Final Presentation - Detailed Analysis & Overview
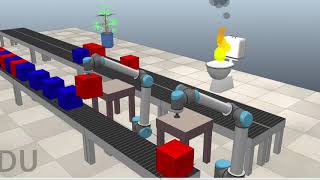
Team Book Worm Team Members: Ali Albazroun Team Name: \"Am I two?\"\n\"No, UR3.\" Members: Abel John - abelj2 Anshul Sanam - anshul2 Ewan Bohannon - eyb2 Remzo ... Forward Kinematics of Closed Chain Robots. Authors: Pablo Corral Vila and Lucía Albelda Gimeno School: University of Illinois Course: This simulation demonstrates an object moved by a robotic arm from arbitrary start location to given goal location. Marc Backas ... Our VREP simulation illustrates an example of how a UR3 robot, using a suction cup, could sort incoming objects from a conveyor ...