Media Summary: [ECCV 2024] Continuous Memory Representation for Anomaly Detection Recovering the camera motion and scene geometry from visual data is a fundamental problem in computer vision. Its success in ... Presentation for the paper: Sukrut Rao*, Sweta Mahajan*, Moritz Böhle, Bernt Schiele. Discover-then-Name: Task-Agnostic ...
Eccv 2024 Aligning Neuronal Coding - Detailed Analysis & Overview
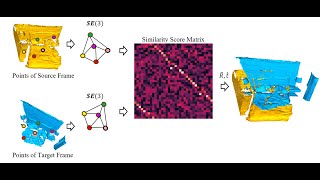
[ECCV 2024] Continuous Memory Representation for Anomaly Detection Recovering the camera motion and scene geometry from visual data is a fundamental problem in computer vision. Its success in ... Presentation for the paper: Sukrut Rao*, Sweta Mahajan*, Moritz Böhle, Bernt Schiele. Discover-then-Name: Task-Agnostic ... Point cloud registration is a foundational task for 3D Predicting a potential collision with leading vehicles is an essential functionality of any autonomous/assisted driving system. Teaser Video for the peer-reviewed research that will be presented at
Skeleton Recall Loss for Connectivity Conserving and Resource Efficient Segmentation of Thin Tubular Structures We present ...
![[ECCV 2024] Aligning Neuronal Coding of Dynamic Visual Scenes with Foundation Vision Models](https://i.ytimg.com/vi/UUWpEomYf9E/mqdefault.jpg)
![[ECCV 2024] Continuous Memory Representation for Anomaly Detection](https://i.ytimg.com/vi/m24G5sT7s4E/mqdefault.jpg)

![[ECCV 2024] Accelerating Online Mapping and Behavior Prediction via Direct BEV Feature Attention](https://i.ytimg.com/vi/UHWWchpcIdY/mqdefault.jpg)
![[ECCV 2024 Oral] Sync from the Sea: Retrieving Alignable Videos from Large-Scale Datasets](https://i.ytimg.com/vi/6euQwz7XdQk/mqdefault.jpg)

![[ECCV 2024] Discover-then-Name: Task-Agnostic Concept Bottlenecks via Automated Concept Discovery](https://i.ytimg.com/vi/LTPgeylRbJk/mqdefault.jpg)

![[ECCV 24] EAS-SNN: End-to-End Adaptive Sampling and Representation with Spiking Neural Networks.](https://i.ytimg.com/vi/uz4OAqfML9U/mqdefault.jpg)

![[ECCV 2024 Oral] Decoupling Common & Unique Representations for Multimodal Self-supervised Learning](https://i.ytimg.com/vi/xEsYRRKpphY/mqdefault.jpg)
