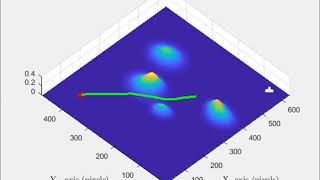
Media Summary: Dynamic Path Planning using Potential Field Method S. Eiffert, H. Kong, N. Pirmarzdashti and S. Sukkarieh " Simulation: Path Planning of Robot using Deep RL - Case 2- Dynamic Obstacles
Dynamic Path Planning Using Electrostatic - Detailed Analysis & Overview
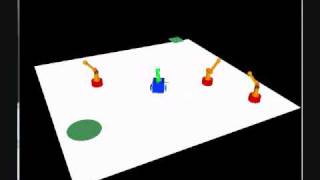
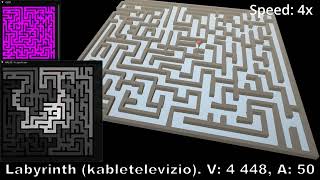
Dynamic Path Planning using Potential Field Method S. Eiffert, H. Kong, N. Pirmarzdashti and S. Sukkarieh " Simulation: Path Planning of Robot using Deep RL - Case 2- Dynamic Obstacles Published at IEEE Robotics and Automation Letters (RA-L), 2020 Abstract: stand alone LRTA* for path planning in dynamic environment Response to new obstacles detected during driving of a stabilized formation. Formation is stabilized based on MPC technique ...