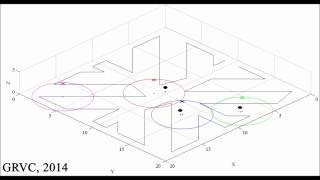
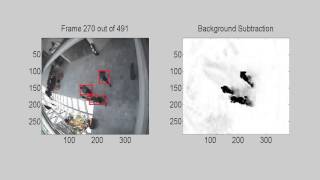
Media Summary: This video is accelerated 2x. It shows as a team of two homogeneous aerial robots This video is accelerated 2x. A team of 4 aerial robots with different capabilities guards an area against a set of intruders. Paper link: Abstract: We study the problem of assigning robots with actions to track targets.
Dynamic Allocation For Multi Target - Detailed Analysis & Overview
This video is accelerated 2x. It shows as a team of two homogeneous aerial robots This video is accelerated 2x. A team of 4 aerial robots with different capabilities guards an area against a set of intruders. Paper link: Abstract: We study the problem of assigning robots with actions to track targets. Paper: We study the problem of assigning robots with actions to track targets. The objective is to ... Examples of novel tracking algorithms developed by RMIT researchers which could be used onboard UAS. A novel Bayesian ... S. Park, Y. D. Zhong, and N. E. Leonard, "
In this paper, a novel deep reinforcement learning based approach is proposed to take both Supplemental Video to the following paper: Improving Global