Media Summary: These are the final results we have obtained on reproducing the paper results In this class, we are going to see how to reproduce the results of the famous paper " To help make deep learning more accessible, researchers from NVIDIA have introduced a structured
Domain Randomization With Fetch Robot - Detailed Analysis & Overview
These are the final results we have obtained on reproducing the paper results In this class, we are going to see how to reproduce the results of the famous paper " To help make deep learning more accessible, researchers from NVIDIA have introduced a structured This Live Class is about how to create datasets from simulations and how to manage them. We are going to see: ▸ How to create ... Final result we have obtained by applying We have replicated the results of the amazing paper by OpenAI "
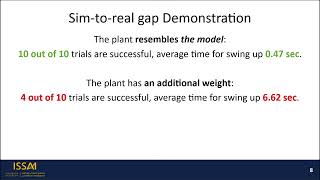
Course Instructor: Pieter Abbeel Guest Lecturer: Josh Tobin Course Website: ... Learn more: Directed by: Rachel Fong Music: Imagination" by ... The video demonstrates our solution of the sim-to-real gap of reinforcement learning policy caused by a mismatch of simulated ... Using Data-Driven Domain Randomization to Transfer Robust Control Policies to Mobile Robots OpenAI recently created a new algorithm that teaches