Media Summary: Distributed Trajectory Planning for Multiple Robots in Space Time Graph Status: Accepted for publication in IEEE Robotics and Automation Letters (RA-L) □Full title: DMVC-Tracker: A Real Time and Fully Distributed Approach to Trajectory Planning for Multi Robot Systems
Distributed Trajectory Planning For Multiple - Detailed Analysis & Overview
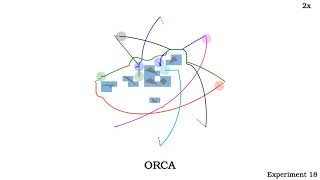
Distributed Trajectory Planning for Multiple Robots in Space Time Graph Status: Accepted for publication in IEEE Robotics and Automation Letters (RA-L) □Full title: DMVC-Tracker: A Real Time and Fully Distributed Approach to Trajectory Planning for Multi Robot Systems This video visualizes the work presented in "Increasing Feasibility with Dynamic Priority Assignment in Supplemental video for our paper at DARS 2018. Authors: B. Şenbaşlar, W. Hönig, and N. Ayanian. Abstract: Robust ICRA2024 submission code: paper: the same name in arxiv Title-Asynchronous Spatial ...
Paper: * Status: T-RO 2023 accepted * Category: Status: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2019 accepted * Category: This video accompanies the paper entitled "