Media Summary: ICRA 2018 Spotlight Video Interactive Session Wed AM Pod G.1 Authors: Knobloch, Adrian; Vahrenkamp, Nikolaus; Waechter, ... Motion Planning with Collision Prediction This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ...
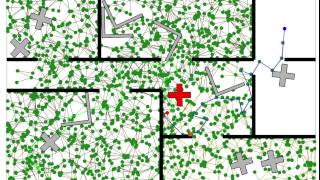
Distance Aware Dynamically Weighted Roadmaps - Detailed Analysis & Overview
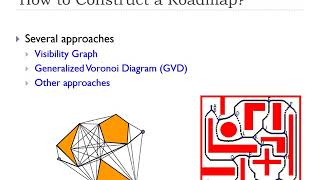
ICRA 2018 Spotlight Video Interactive Session Wed AM Pod G.1 Authors: Knobloch, Adrian; Vahrenkamp, Nikolaus; Waechter, ... Motion Planning with Collision Prediction This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ... This work has been submitted to the International Conference on Robotics and Automation 2016. Abstract: In this work, we ... In this video, I introduce two important concepts in robot path planning: Visibility Graph and Generalized Voronoi Diagram. This episode explores a subtle but important shift in observation during Week 25. Rather than focusing only on the gap between ...
... is the gap between what I the agent builder specified and what the agent actually executed on is the Yiming Yang, Wolfgang Merkt, Vladimir Ivan, Zhibin Li and Sethu Vijayakumar, HDRM: A Resolution Complete 0:00:00 Start 0:01:10 Grundlagen der Bewegungsplanung: Begriffsbildung 0:02:31 Probabilistic Animation supporting the algorithm proposed in the paper "Collision Free Path Planning for Unmanned Aerial Vehicles in ... How to use the Teacher Narrative node in Roadmaps?