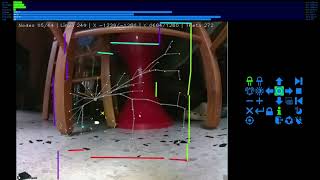
Media Summary: This video demonstrates a fully interactive visual simulation of the Step by step instructions showing how to run path planning simulation in Coppeliasim (V-rep) of a mobile
Dijkstra S Algorithm Realtime Robotic - Detailed Analysis & Overview
This video demonstrates a fully interactive visual simulation of the Step by step instructions showing how to run path planning simulation in Coppeliasim (V-rep) of a mobile By utilizing image processing, graph theory and shortest path finding Implementation of Dijkstra on a rigid robot