Media Summary: Affiliation: 4th-year undergraduate student, Daniel Guggenheim School of Aerospace Engineering, Georgia Institute of ... Lecture 11 for Optimal Control and Reinforcement Learning (CMU 16-745) 2023 by Prof. Zac Manchester. Topics: - ... on uncertainty and a novel Augmented Lagrangian based stochastic
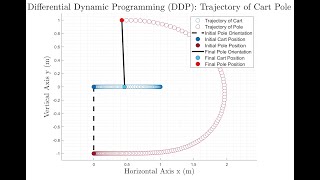
Differential Dynamic Programming Ddp Trajectory - Detailed Analysis & Overview
Affiliation: 4th-year undergraduate student, Daniel Guggenheim School of Aerospace Engineering, Georgia Institute of ... Lecture 11 for Optimal Control and Reinforcement Learning (CMU 16-745) 2023 by Prof. Zac Manchester. Topics: - ... on uncertainty and a novel Augmented Lagrangian based stochastic Lecture 11 for Optimal Control and Reinforcement Learning 2022 by Prof. Zac Manchester. Topics: - In this work we aim to answer the question how we can leverage the Lecture 12 for Optimal Control and Reinforcement Learning (CMU 16-745) 2025 by Prof. Zac Manchester. Topics: -