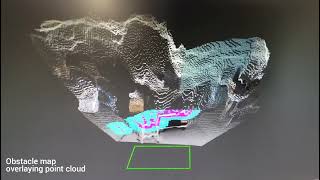
Media Summary: Example Video EKF Map to Odom Localization Obstacles Moving with Local Costmap This video was made in the purpuse Link of the git project: TRRT-Based path planning on discrete costmap
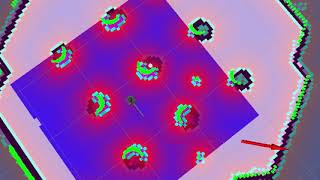
Demo Costmap Sample - Detailed Analysis & Overview
Example Video EKF Map to Odom Localization Obstacles Moving with Local Costmap This video was made in the purpuse Link of the git project: TRRT-Based path planning on discrete costmap Get all the ROS code of the video in this link: In the following video, we are going to explain, using ... This work has been submitted to the International Conference on Robotics and Automation 2016. Abstract: In this work, we ...







![[ROS Q&A] 168 - What are the differences between global and local costmap](https://i.ytimg.com/vi/qPNs6pAZGtA/mqdefault.jpg)
