Media Summary: This work presents a kinodynamic motion planner for a heterogeneous team of robots that respects robot dynamics and directly ... We combine the scalability of the MAPF algorithm LaCAM with kinodynamic motion planning. Our method, discontinuity-Bounded ... Video for paper accepted at IEEE/RSJ international conference on intelligent robots and systems (IROS) , 2022. Authors: ...
Db Ecbs Interaction Aware Multi - Detailed Analysis & Overview
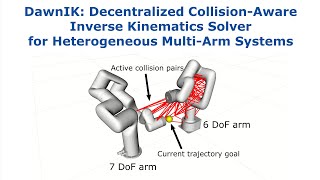
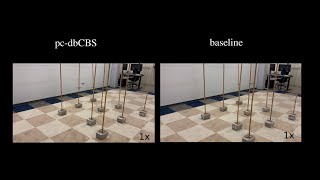
This work presents a kinodynamic motion planner for a heterogeneous team of robots that respects robot dynamics and directly ... We combine the scalability of the MAPF algorithm LaCAM with kinodynamic motion planning. Our method, discontinuity-Bounded ... Video for paper accepted at IEEE/RSJ international conference on intelligent robots and systems (IROS) , 2022. Authors: ... This video demonstrates the work presented in our paper “DawnIK: Decentralized Collision- Motion planning problems for physically-coupled Support video for paper presented at 15th Annual RoboCup International Symposium Authors: Aris Valtazanos, Subramanian ...
Planning agile whole-body motions for legged and humanoid robots is a fundamental capability for enabling dynamic tasks such ...